
Page 8 - Shimadzu Dynamic and Fatigue Testing Systems
P. 8
Accurately Reproduces Actual Operating Waveforms
The Servo Controller 4830 has a waveform correction function that helps accurately reproduce input waveforms. Used in combination with
various additional software, it can be used to simulate actual operating waveforms determined by measuring the status of actual loads or
Evaluate simulate the most severe conditions by continuously applying loads at the resonant frequency. The Servo Controller 4830 optimizes actuator
control based on various testing requirements to enable highly precise and accurate testing.
Product Endurance in
Any Manner Desired Waveform Distortion Correction
This function makes it possible to correct the waveform based on the frequency characteristics of the loading mechanism (transfer function correction), which helps achieve the
intended target waveform. Because it can correct for loading mechanism-specific periodic strain, it can cancel out unwanted strain components and accurately control loads
according to the target waveform. Complicated actual loading profiles that were difficult to simulate can now be specified easily using this controller and software.
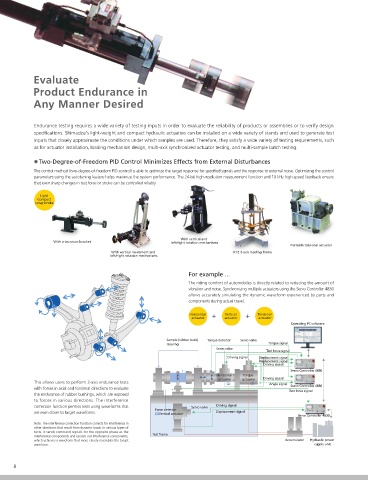
Endurance testing requires a wide variety of testing inputs in order to evaluate the reliability of products or assemblies or to verify design
Graph1: Distortion Correction
specifications. Shimadzu's light-weight and compact hydraulic actuators can be installed on a wide variety of stands and used to generate test
X axis
inputs that closely approximate the conditions under which samples are used. Therefore, they satisfy a wide variety of testing requirements, such The response waveform is rounded and the high-frequency X-Target
region waveform cannot be reproduced. Waveform
(Disp_X)
as for actuator installation, loading mechanism design, multi-axis synchronized actuator testing, and multi-sample batch testing. X-Target Waveform (Disp_X) X-Response Waveform (Disp_X) X-Response
Graph1: Distortion Correction Waveform
X axis X-Target (Disp_X)
Waveform
Two-Degree-of-Freedom PID Control Minimizes Effects from External Disturbances X-Target Waveform (Disp_X) Time (sec) X-Response Waveform (Disp_X) (Disp_X) Precisely matches Y axis Graph2: Distortion Correction Time (sec)
X-Response
Waveform
(Disp_X)
Y axis Graph2: Distortion Correction the target waveform
The control method (two-degree-of-freedom PID control) is able to optimize the target response for specified signals and the response to external noise. Optimizing the control Y-Target Waveform (Disp_Y) Y-Response Waveform (Disp_Y) Y-Target due to correction. Y-Response Waveform (Disp_Y) Y-Target
Waveform
Waveform
(Disp_Y)
(Disp_Y)
Y-Response
parameters using the autotuning feature helps maximize the system performance. The 24-bit high-resolution measurement function and 10 kHz high-speed feedback ensure Waveform Y-Target Waveform (Disp_Y) Y-Response
(Disp_Y)
Time (sec) Waveform
Graph3: Distortion Correction (Disp_Y)
that even sharp changes in test force or stroke can be controlled reliably. Z axis Z-Target Time (sec)
Z-Target Waveform (Disp_Z) Z-Response Waveform (Disp_Z) Waveform Graph3: Distortion Correction
(Disp_Z)
Z-Response
Waveform
Light Time (sec) (Disp_Z) Z axis
Compact Graph of input waveform Z-Target
Waveform
Long Stroke before correction Z-Target Waveform (Disp_Z) Z-Response Waveform (Disp_Z) (Disp_Z)
Z-Response
Waveform
Time (sec) (Disp_Z)
Graph1: Distortion Correction
X axis
Waveform
(Disp_X)
With vertical and X-Target Waveform (Disp_X) X-Response Waveform (Disp_X) X-Target
With a trunnion bracket left/right rotation mechanisms Response drops above 30 Hz. X-Response
Portable torsional actuator Waveform
Graph1: Distortion Correction (Disp_X)
X axis
With vertical movement and XYZ 3-axis loading frame X-Target Frequency (Hz)
Waveform
left/right rotation mechanisms X-Target Waveform (Disp_X) X-Response Waveform (Disp_X) (Disp_X) Y axis Graph2: Distortion Correction
X-Response
Waveform
(Disp_X)
Frequency (Hz) Accurately reproduces
Graph2: Distortion Correction Y-Target
Y axis Y-Target the 50 Hz maximum Waveform
Y-Target Waveform (Disp_Y) Y-Response Waveform (Disp_Y) Waveform frequency of the target. Y-Target Waveform (Disp_Y) Y-Response Waveform (Disp_Y) (Disp_Y)
Y-Response
(Disp_Y)
For example ... Waveform Waveform
Y-Response
(Disp_Y)
Frequency (Hz) (Disp_Y)
Graph3: Distortion Correction
Z axis Frequency (Hz)
The riding comfort of automobiles is directly related to reducing the amount of Z-Response Waveform (Disp_Z) Z-Target Graph3: Distortion Correction
Waveform
(Disp_Z)
vibration and noise. Synchronizing multiple actuators using the Servo Controller 4830 Z-Target Waveform (Disp_Z) Z-Response Z axis
Waveform
(Disp_Z)
Frequency (Hz) Z-Target
allows accurately simulating the dynamic waveform experienced by parts and Waveform
Graph of frequency before correction Z-Target Waveform (Disp_Z) Z-Response Waveform (Disp_Z) (Disp_Z)
components during actual travel. Z-Response
Waveform
(Disp_Z)
Frequency (Hz)
Horizontal Vertical Torsional
actuator actuator actuator
Operating PC software
Sample (rubber bush) Torque detector Servo valve
Bearing Torque signal Guaranteeing Endurance
Servo valve
Test force signal
Driving signal Displacement signal Random waves are used to
Displacement signal detect resonance frequency
Driving signal Simulates the Most Severe Loading Conditions within seconds.
Servo Controller 4830
Horizontal Torque Using the Resonance Frequency Tracking Testing
actuator actuator Driving signal
This allows users to perform 3-axis endurance tests (2) (1) Angle signal To guarantee product endurance, the resonance frequency is input because it results
with forces in axial and torsional directions to evaluate Servo Controller 4830 Resonance 1 Resonance 2
6 Hz
Test force signal in the highest load levels. The resonance frequency can be determined in only a few 47.5 Hz
the endurance of rubber bushings, which are exposed seconds. It can also be automatically tracked if it changes due to sample fatigue. This
to forces in various directions. The interference reduces the labor required to manually specify the resonance frequency and the Automatically selects
the frequency with
correction function permits tests using waveforms that Servo valve Driving signal the highest peak value.
Force detector stress on samples.
are even closer to target waveforms. (3)Vertical actuator Displacement signal Automatically selects
Servo Controller 4830 the frequency with
the highest peak value.
Note: The interference correction function corrects for interference in
other directions that result from dynamic loads. In various types of
tests, it sends command signals for the opposite phase as the
interference components and cancels out interference components, Test frame
which achieves a waveform that more closely resembles the target Accumulator Hydraulic power
waveform. supply unit
8 9